




1. ຄວາມຫຍຸ້ງຍາກໃນຂະບວນການປະກອບແກນວາວ
ໃນການສຶກສາຄັ້ງນີ້, ຫຼັງຈາກໄດ້ດູດຊຶມປະສົບການການອອກແບບຂອງລະບົບປະກອບອັດຕະໂນມັດອື່ນໆ, ລະບົບປະກອບເຄິ່ງອັດຕະໂນມັດທີ່ມີຢູ່ແລ້ວໄດ້ຖືກວິເຄາະ, ແລະສ່ວນກົນຈັກຂອງລະບົບໄດ້ຖືກອອກແບບຢ່າງສົມບູນໂດຍອີງໃສ່ການຈຳລອງຂອງແກນວາວຂະບວນການປະກອບ. ໃນແຜນການອອກແບບລະບົບ, ພວກເຮົາພະຍາຍາມເຮັດໃຫ້ການປະມວນຜົນຂອງຊິ້ນສ່ວນກົນຈັກສະດວກ, ຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍ, ເຮັດໃຫ້ການປະກອບຊິ້ນສ່ວນງ່າຍດາຍ ແລະ ສະດວກ, ແລະ ເຮັດໃຫ້ລະບົບມີຄວາມເປີດກວ້າງ ແລະ ຄວາມສາມາດໃນການຂະຫຍາຍໄດ້ໃນລະດັບໃດໜຶ່ງ, ເພື່ອເພີ່ມຄວາມໜ້າເຊື່ອຖື ແລະ ປະສິດທິພາບຂອງລະບົບ., ແລະ ວາງພື້ນຖານທີ່ດີສຳລັບການປັບປຸງປະສິດທິພາບດ້ານຄ່າໃຊ້ຈ່າຍຂອງລະບົບ.
ເທວາວແກນກາງລະບົບການປະກອບສ່ວນໃຫຍ່ແມ່ນແບ່ງອອກເປັນສາມສ່ວນໃນແງ່ຂອງການອອກແບບໂຄງສ້າງກົນຈັກຂອງມັນ, ຄື: ສອງສ່ວນປະກອບຢູ່ແຈເບື້ອງຊ້າຍດ້ານເທິງຂອງໂຕະເຮັດວຽກ, ສາມສ່ວນປະກອບຢູ່ແຈເບື້ອງຊ້າຍດ້ານລຸ່ມ ແລະ ເຈັດສ່ວນປະກອບຢູ່ເບື້ອງຂວາຂອງສ່ວນໂຕະເຮັດວຽກ. ຄວາມຫຍຸ້ງຍາກທາງດ້ານເຕັກນິກຂອງການປະກອບສອງຊິ້ນແມ່ນວິທີການຮັບປະກັນຮູບຊົງວົງມົນຂອງວົງແຫວນປະທັບຕາ. ໃນລະຫວ່າງຂະບວນການຕັດ, ມັນຈະຖືກແຮງອັດອອກຕາມແກນຂອງໃບມີດ, ສະນັ້ນມັນງ່າຍທີ່ຈະຜິດຮູບ. ອັນທີສອງ, ໃນລະຫວ່າງຂະບວນການປະກອບ, ເມື່ອກວດພົບແກນເຫຼັກຢູ່ເທິງອົງປະກອບເຄື່ອງມືໂອນຍ້າຍ, ມັນຈຳເປັນຕ້ອງຮັບຮູ້ການກອງ ແລະ ການປະກອບລະຫວ່າງອົງປະກອບຕ່າງໆຂອງແກນປະຕູຜ່ານການສັ່ນສະເທືອນ. ດັ່ງນັ້ນ, ແຕ່ລະອົງປະກອບຈະຕົກຢູ່ໃນຕຳແໜ່ງທີ່ສອດຄ້ອງກັນເພື່ອກາຍເປັນຈຸດເຊື່ອມຕໍ່ການປະກອບ. ຄວາມຫຍຸ້ງຍາກຂອງຂະບວນການແມ່ນ. ບັນຫາຂ້າງເທິງນີ້ແມ່ນເຫດຜົນຫຼັກສຳລັບການເພີ່ມຂຶ້ນຂອງອັດຕາຜະລິດຕະພັນທີ່ມີຂໍ້ບົກພ່ອງໃນການປະກອບແກນວາວໃນຂັ້ນຕອນນີ້. ໂດຍອີງໃສ່ສິ່ງນີ້, ເອກະສານສະບັບນີ້ປັບປຸງຂະບວນການຂອງການປະກອບແກນວາວໃຫ້ດີທີ່ສຸດ, ແລະ ເພີ່ມລະບົບການກວດກາຄຸນນະພາບເພື່ອປັບປຸງອັດຕາຄຸນວຸດທິຂອງການປະກອບແກນວາວ.
2. ໂຄງການປະກອບແກນວາວອັດສະລິຍະ
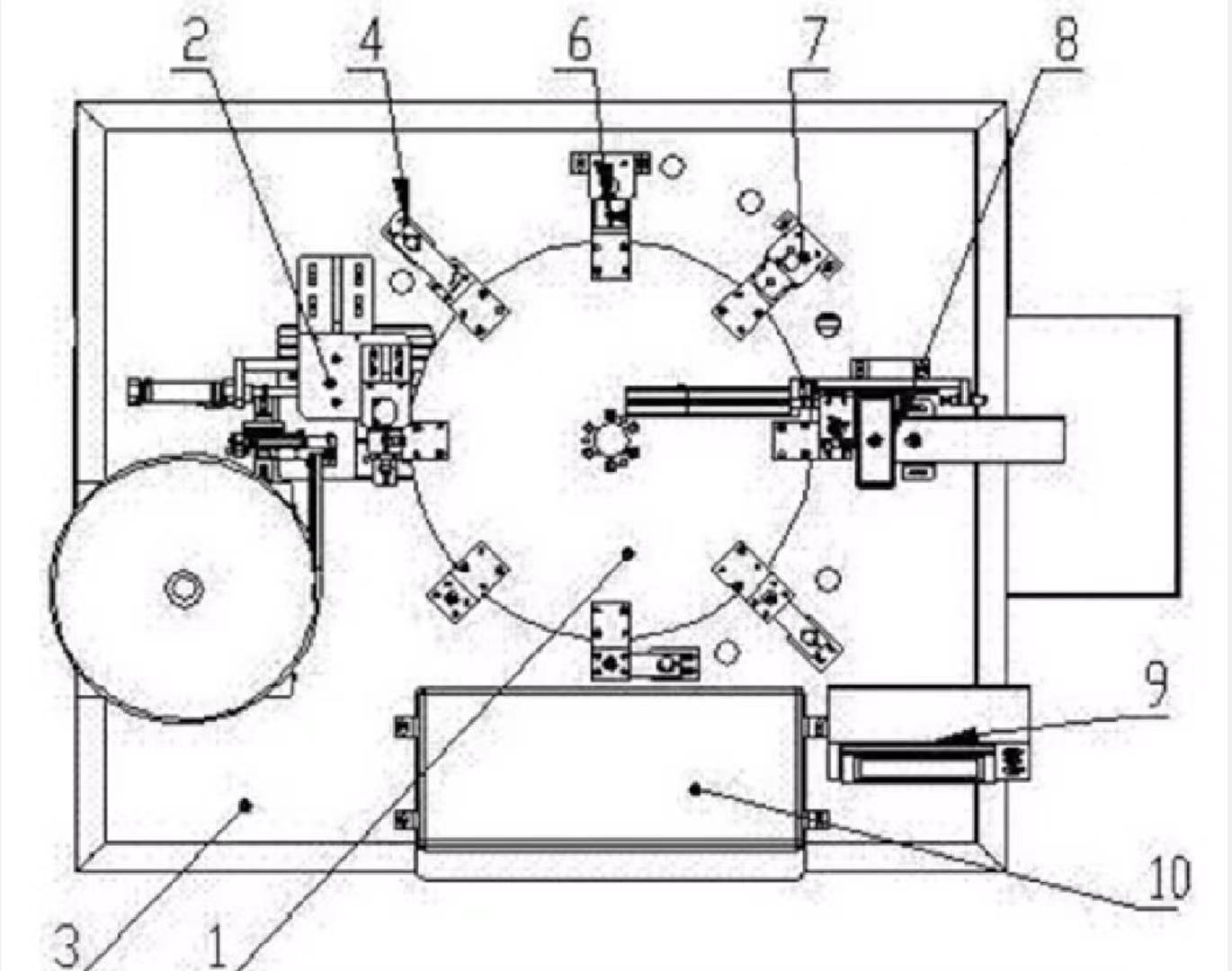
ອິນເຕີເຟດການດຳເນີນງານ ແລະ PLC ປະກອບເປັນສ່ວນຄວບຄຸມຕາມເຫດຜົນ, ແລະລະບົບກວດຈັບ ແລະ PLC ມີການໄຫຼຂໍ້ມູນສອງທາງເພື່ອເກັບກຳຂໍ້ມູນສະຖານະຂອງລະບົບປະກອບ ແລະ ສົ່ງອອກສັນຍານຄວບຄຸມ. ໃນຖານະເປັນສ່ວນບໍລິຫານ, ລະບົບຂັບເຄື່ອນຖືກຄວບຄຸມໂດຍກົງໂດຍສ່ວນຜົນຜະລິດຂອງ PLC. ຍົກເວັ້ນລະບົບການໃຫ້ອາຫານ, ເຊິ່ງຕ້ອງການການຊ່ວຍເຫຼືອດ້ວຍມື, ຂະບວນການອື່ນໆໃນລະບົບນີ້ໄດ້ຮັບຮູ້ການປະກອບທີ່ສະຫຼາດ. ການພົວພັນລະຫວ່າງມະນຸດກັບຄອມພິວເຕີທີ່ດີແມ່ນບັນລຸໄດ້ຜ່ານໜ້າຈໍສຳຜັດ. ໂດຍພິຈາລະນາເຖິງຄວາມສະດວກສະບາຍຂອງການປະຕິບັດງານໃນການອອກແບບກົນຈັກ, ກ່ອງວາງແກນປະຕູແມ່ນຢູ່ຕິດກັບໜ້າຈໍສຳຜັດ. ກົນໄກການກວດຈັບ, ອົງປະກອບເປົ່າລົມເປີດດ້ານເທິງຂອງແກນປະຕູ, ອົງປະກອບກວດຈັບຄວາມສູງຂອງແກນວາວ ແລະ ກົນໄກການເປົ່າແມ່ນຖືກຈັດລຽງຕາມລຳດັບອ້ອມຮອບອົງປະກອບເຄື່ອງມືໝຸນ, ເຮັດໃຫ້ຮູບແບບການຜະລິດສາຍປະກອບຂອງການປະກອບແກນປະຕູເປັນຈິງ. ລະບົບກວດຈັບສ່ວນໃຫຍ່ແມ່ນເຮັດສຳເລັດການກວດຈັບແກນ, ການກວດຈັບຄວາມສູງຂອງການຕິດຕັ້ງ, ການກວດກາຄຸນນະພາບ, ແລະອື່ນໆ, ເຊິ່ງບໍ່ພຽງແຕ່ຮັບຮູ້ເຖິງອັດຕະໂນມັດຂອງການເລືອກວັດສະດຸ ແລະ ການລັອກແກນວາວເທົ່ານັ້ນ, ແຕ່ຍັງຮັບປະກັນຄວາມໝັ້ນຄົງ ແລະ ປະສິດທິພາບສູງຂອງຂະບວນການປະກອບ. ໂຄງສ້າງຂອງແຕ່ລະໜ່ວຍຂອງລະບົບແມ່ນສະແດງຢູ່ໃນຮູບທີ 1.
ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້, ໂຕະໝຸນແມ່ນຈຸດເຊື່ອມຕໍ່ສູນກາງຂອງຂະບວນການທັງໝົດ, ແລະການປະກອບແກນວາວແມ່ນສຳເລັດໂດຍການຂັບເຄື່ອນຂອງໂຕະໝຸນ. ເມື່ອກົນໄກການກວດສອບທີສອງກວດພົບອົງປະກອບທີ່ຈະປະກອບ, ມັນຈະສົ່ງສັນຍານໄປຫາລະບົບຄວບຄຸມ, ແລະລະບົບຄວບຄຸມຈະປະສານງານວຽກງານຂອງແຕ່ລະໜ່ວຍຂະບວນການ. ກ່ອນອື່ນໝົດ, ແຜ່ນສັ່ນສະເທືອນຈະສັ່ນແກນປະຕູອອກແລະລັອກມັນໄວ້ໃນປາກວາວດູດເຂົ້າ. ກົນໄກການກວດສອບທຳອິດຈະກວດສອບແກນວາວທີ່ຍັງບໍ່ໄດ້ຕິດຕັ້ງສຳເລັດຜົນວ່າເປັນວັດສະດຸທີ່ບໍ່ດີໂດຍກົງ. ອົງປະກອບທີ 6 ກວດພົບວ່າການລະບາຍອາກາດຂອງແກນວາວມີຄຸນສົມບັດຫຼືບໍ່, ແລະອົງປະກອບທີ 7 ກວດພົບວ່າຄວາມສູງຂອງການຕິດຕັ້ງຂອງແກນວາວຕອບສະໜອງມາດຕະຖານຫຼືບໍ່. ມີພຽງແຕ່ຜະລິດຕະພັນທີ່ມີຄຸນນະພາບໃນສາມຈຸດເຊື່ອມຕໍ່ຂ້າງເທິງເທົ່ານັ້ນທີ່ຈະຖືກເກັບໄວ້ໃນກ່ອງຜະລິດຕະພັນທີ່ດີ, ຖ້າບໍ່ດັ່ງນັ້ນພວກມັນຈະຖືກປະຕິບັດວ່າເປັນຜະລິດຕະພັນທີ່ມີຂໍ້ບົກພ່ອງ.
ການຊຸມນຸມທີ່ສະຫຼາດຂອງແກນວາວແມ່ນຄວາມຫຍຸ້ງຍາກທາງດ້ານເຕັກນິກຂອງການອອກແບບລະບົບ. ໃນການອອກແບບນີ້, ການອອກແບບສາມກະບອກສູບໄດ້ຖືກຮັບຮອງເອົາ. ກະບອກສູບເລື່ອນຄວບຄຸມການປ່ອຍເພື່ອຮັບປະກັນຄວາມເປັນເອກະລັກຂອງການປ່ອຍ; ກະບອກສູບທີສອງຮັບປະກັນວ່າແກນລັອກສອດຄ່ອງກັບຮູປ່ອຍ, ແລະຫຼັງຈາກນັ້ນຮ່ວມມືກັບກະບອກສູບເລື່ອນເພື່ອເຮັດໃຫ້ແກນວາວເຂົ້າໄປໃນແກນລັອກສົມບູນ, ແລະຫຼັງຈາກນັ້ນກະບອກສູບທີສອງສືບຕໍ່ຍູ້ກົນໄກລັອກທັງໝົດໃຫ້ເຄື່ອນຍ້າຍ, ແລະຫົວດູດຈະດູດວາວເມື່ອມັນໄປຮອດດ້ານລຸ່ມຂອງເຄື່ອງມື. ສຸດທ້າຍ, ຫຼັງຈາກກະບອກສູບທີສາມຍູ້ກົນໄກລັອກເຂົ້າໄປໃນບ່ອນ, ມໍເຕີ servo ຈະສົ່ງແກນວາວໄປຫາປາກວາວດູດເພື່ອເຮັດການປະກອບແກນວາວໃຫ້ສຳເລັດ. ຂະບວນການນີ້ຮັບປະກັນຄວາມຖືກຕ້ອງແລະຄວາມເປັນເອກະລັກຂອງຕຳແໜ່ງການເຄື່ອນໄຫວຕາມລວງຍາວແລະຂ້າງ, ແລະໃຫ້ວິທີແກ້ໄຂທີ່ດີຕໍ່ຄວາມຫຍຸ້ງຍາກທາງດ້ານເຕັກນິກຂອງການປະກອບແກນປະຕູ..
3. ການອອກແບບອົງປະກອບຫຼັກຂອງລະບົບປະກອບແກນວາວ
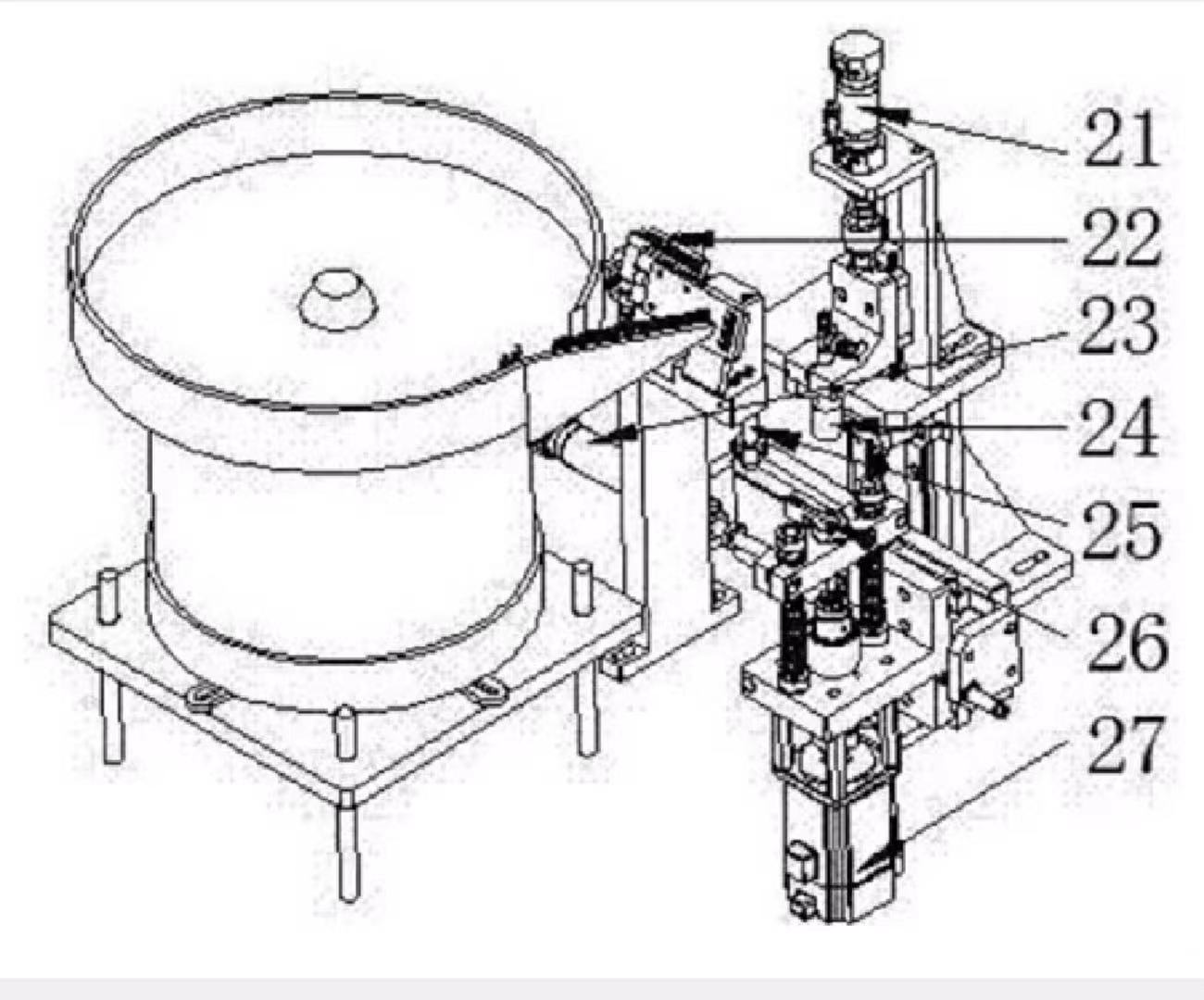
ເປັນຂະບວນການຫຼັກຂອງການຕິດຕັ້ງແກນວາວໃນວາວ, ການລັອກແກນວາວມີຄວາມຕ້ອງການສູງຫຼາຍກ່ຽວກັບຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງການເຄື່ອນໄຫວຂອງແກນວາວ, ສະນັ້ນມັນຕ້ອງການການປະສານງານຂອງກົນໄກຕາມລວງຍາວ ແລະ ຂ້າງຄຽງເພື່ອໃຫ້ສຳເລັດ. ໃນການອອກແບບສ່ວນນີ້, ມັນຖືກແບ່ງອອກເປັນການກະທຳດຽວ, ການກະທຳການປ່ອຍຂອງແກນວາວ, ການກະທຳລັອກຂອງຄັນລັອກ ແລະ ການກະທຳຂອງການໂຫຼດແກນວາວໃສ່ປາກວາວ. ໂຄງສ້າງກົນຈັກຂອງມັນແມ່ນສະແດງຢູ່ໃນຮູບທີ 2. ດັ່ງທີ່ເຫັນໄດ້ຈາກຮູບທີ 2, ໂຄງສ້າງກົນຈັກຂອງການປະກອບແກນວາວແບ່ງອອກເປັນສາມສ່ວນ. ທັງສາມສ່ວນເຮັດວຽກປະສານງານກັນໂດຍບໍ່ມີຜົນກະທົບຕໍ່ກັນ. ເມື່ອການກະທຳທີ່ເປັນອິດສະຫຼະສຳເລັດ, ກະບອກສູບຈະຍູ້ກົນໄກເພື່ອຍ້າຍໄປທີ່ຕຳແໜ່ງການປະກອບຕໍ່ໄປ.
ເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງທີ່ເຄື່ອນທີ່, ການອອກແບບທີ່ສົມບູນແບບຂອງການຄວບຄຸມໄຟຟ້າ ແລະ ຂອບເຂດກົນຈັກໄດ້ຖືກຮັບຮອງເອົາເພື່ອຄວບຄຸມຄວາມຜິດພາດພາຍໃນ 1.4 ມມ. ແກນວາວ ແລະ ຈຸດໃຈກາງຂອງປາກວາວແມ່ນ coaxial, ດັ່ງນັ້ນມໍເຕີ servo ສາມາດຍູ້ແກນວາວເຂົ້າໄປໃນປາກວາວໄດ້ຢ່າງລຽບງ່າຍ, ຖ້າບໍ່ດັ່ງນັ້ນມັນຈະເຮັດໃຫ້ເກີດຄວາມເສຍຫາຍຕໍ່ຊິ້ນສ່ວນຕ່າງໆ. ການຢຸດຊະງັກຂອງໂຄງສ້າງກົນຈັກ ຫຼື ການກະພິບທີ່ຜິດປົກກະຕິຂອງສັນຍານໄຟຟ້າສາມາດເຮັດໃຫ້ເກີດການຜິດປົກກະຕິເລັກນ້ອຍໃນວຽກງານປະກອບ. ດັ່ງນັ້ນ, ຫຼັງຈາກປະກອບແກນວາວແລ້ວ, ປະສິດທິພາບການລະບາຍອາກາດບໍ່ໄດ້ມາດຕະຖານ, ແລະ ຄວາມສູງຂອງການປະກອບບໍ່ໄດ້ຄຸນນະພາບ, ເຊິ່ງນໍາໄປສູ່ຄວາມລົ້ມເຫຼວຂອງຜະລິດຕະພັນ. ປັດໄຈນີ້ໄດ້ຖືກພິຈາລະນາຢ່າງເຕັມທີ່ໃນການອອກແບບລະບົບ, ການກວດຈັບການເປົ່າລົມ ແລະ ການກວດຈັບຄວາມສູງແມ່ນຖືກນໍາໃຊ້ເພື່ອຄັດແຍກຜະລິດຕະພັນທີ່ບໍ່ດີ..
ເວລາໂພສ: ກັນຍາ-09-2022
